Research Themes
Adaptive and Embedded Artificial Intelligence

Interactive Social Science
Virtual Worlds can help us understand historical events and the social forces involved. This theme concentrates on bringing Social Science to the public; making it interesting and educational. This simulation modeled migration into the Western Hemisphere over 20,000 years ago. The science considered how hunter-gatherers traveled and survived in the harsh climate of the Last Glacial Maximum. Available simulation techniques range from Agent-based models, to 3D emulations like this one to fully immersive scenes of late Pleistocene hunting, survival, and social events. Virtual Agents can be built with biological detail and endowed with autonomous and adaptive machine intelligence. Of course, they can be scripted for deterministic behavior too. Let's be clear, this work integrates all of our research themes, and lies at the limit of our scientific and technical abilities. But, we think this is the future.

Autonomy for Artificial Life
This research theme focuses on the origins of human sociality and collective intelligence. Its technology base relies on the integration of embodied machine intelligence and algorithms grounded on theories about social interaction, cognition, emotion, and personality. Additionally, Virtual Agents, like those seen coming up this hill, inherit a mature code-base of 2.5-D Agent-based model studies wherein the agents possess clear sexual dimorphisms, artificial genetics, have an ability to forage, eat, drink, sleep, reproduce, and will eventually die. This Virtual World was built to resemble the Awash River area in the Afar Depression of East Africa as it may have existed 4-5 million years ago. Candidate progenitors of Homo sapiens may have evolved in such an area. This research theme attempts to synthesize Artificial Life. It uses a pristine, physics-based environment and features social-agent interaction.
Autonomy for Multi-Agent Systems
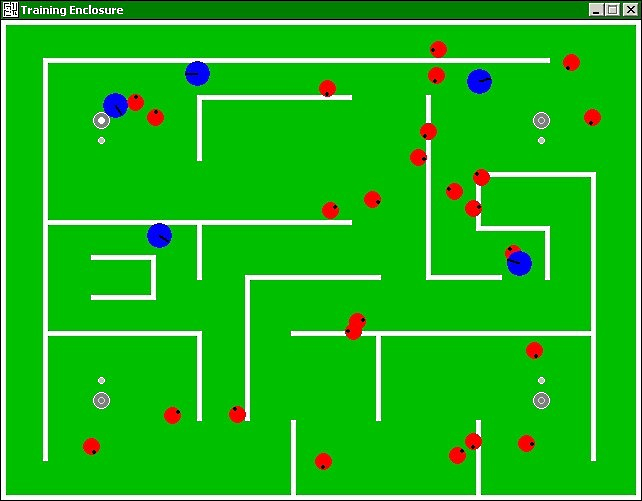
This theme explored the embodiment of P-Type machine intelligence (MI) within iconized agents in a simple Agent-based model. The work demonstrated the extensibility of the MI as a controller and it further suggested the MI might plausibly control some non-player characters (NPC) in social simulations where human-like, adaptive, situated agency was required. In this research theme blue and red (predator and prey) icons were used to embody the agents. Each was responsible for its own "self-education" and survival in a simulated maze inhabited by other MIs. Agent control came from four parallelized and prioritized MIs executing within each icon and across a stylized version of Maslow's (1943) "Hierarchy of Needs". This architecture led to the design of a subsequent cognitive/affective controller for interactive NPCs that require a small memory footprint and very high speed.
Autonomy for Robotic Systems
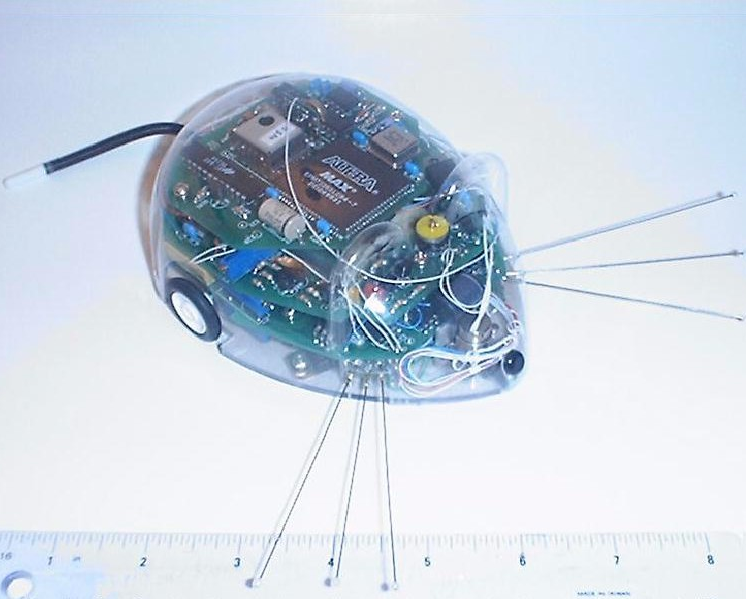
Small robots are always fun to look at and some have uses beyond their obvious appearance. In the mid-20th century G. Walter built a gradient following robot whose function was similar to this artficial rodent. However, his machine was not designed to adapt, learn or to be taught. Similar machines today (Kheperas for example) can be made to adapt and to learn based on needs and settings. In contrast to those, the "rodent" shown here not only learned and could adapt but could also be taught using simple "behavior modification" techniques. Inside this robotic mouse was a Turing P-Type Unorganized Machine. Turing wrote about this form of machine intelligence in 1948 but it wasn't until 2000 that someone actually tested his theory in software and then built it in hardware. You can try out an executable "software" version of this robot for yourself and decide if Turing saw the future in 1948.
Connect with us.
Call us today for more information: (703) 666-8736
(703) 666-8736