Gallery
( Traditional and Metaverse Exhibition )
-
The Maelzel mission is to: develop a technology (a machine) that demonstrates apparent artificial intelligence. That mission will be realized when an embedded and embodied hardware and software technology, situated in a constrained environment emerges demonstrating cybernetic, autonomous, and adaptive agency. Milestones: 1)
Select a Machine Intelligence (MI) , 2)Demonstrate an extensible MI , 3)Select a Virtual World , 4)Emulate hominid biomimesis , 5)Enable Cluster-based Machine Society , 6)Extend emergent biomimetic sociality , 7)Situate and embody biomimetics with MI , 8) show individual avatars to the public within a MetaverseVirtual Exhibition and observe the results. Enjoy the Gallery! -
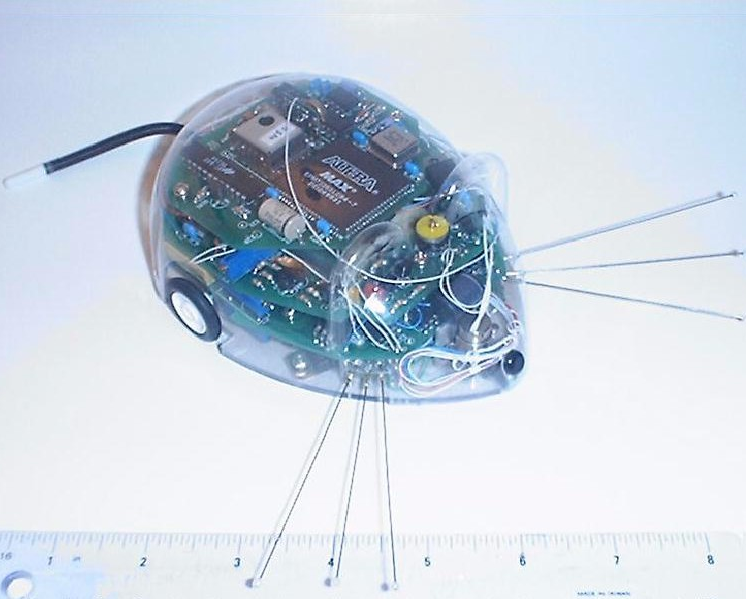
Select a Machine Intelligence (MI). Created by Alan Turing, this MI is a quasi non-deterministic Finite State Machine. It is unusual in that its transition table is undefined until the machine starts to operate. Specifically, the input, output, and potentially next-state characters associated with the transition table entries can be left semi-undefined until run-time experiences shape them according to the Turing P-Type algorithm. In this experiment, the MI was instantiated as the control-agency of an artificial rodent host. The rodent was tasked with either finding food and remembering where it found it or "die." The Turing algorithm worked so well occasionally the artificial rodents had to be sacrificed in order to have their (acquired) memory traces examined. An essay describing this work is on our
Publication page . Or, you candownload a 0.5 MB mp4 video of the rodent. -
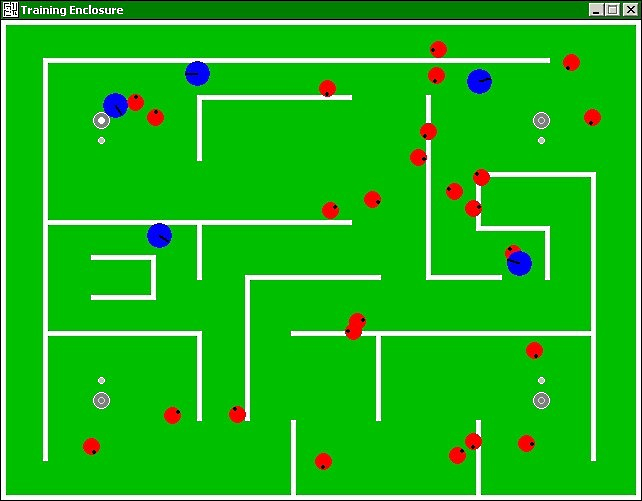
Demonstrate an Extensible Machine Intelligence (MI). BASIC [Basic All-purpose Symbolic Instruction Code] Unorganized Group Simulation (BUGS) demonstrated an instantiation of a Learning Automata (LA) derived from the later theories of Alan Turing. The experiment featured predator and prey agents situated in a 2D maze. The LA is a dynamic, artifactual model of natural intelligence that self-organizes using cybernetic theory. Ganged as a set of four parallel LA, each machine fired across, and was prioritized by, needs drawn from a layer of the Maslow Hierachy of Needs pyramid. This work explored the extensibility of the MI for use in social science modeling applications. There is a short conference proceeding describing this experiment and its results on our
Publication page . The graphic above can be enlarged if you want to:download a 2D graphic (png) 143 KB. -
Select a Virtual World. This simulation was created to characterize the native application program interface (API) between Opensimulator/LibOpenMetaverse. The question was: Could the LibOpenMetaverse API be used to provide embodied agents with sufficient sensorimotor data for social simulation purposes? Here, the avatars execute the same highly choreographed fighting movements. However, because Opensimulator uses an authoritative server model, all avatars share the same (virtual) physical space and time even though each was free to execute its own asychronous behavioral thread. This was vital. Also, social simulation often requires special environments. Here a highly-detailed building was constructed that architecturally resembled the D-Street Port of Entry in Naco, Arizona. During some of the testing the avatar physics capsules were disabled.
Download Video (mp4) 2.4 MB -
Emulate Hominid Biomimesis. "Sexually differentiated philopatry and dispersal: A demonstration of the Baldwin effect and genetic drift". This research used an agent-based model. The agents simulated sexually dimorphic hominids on a simulated terrain. Agent offspring inherited their parents artificial genetics and demonstrated emergent community fission-fusion, genetic drift (Sewall Wright Effect), and ontogenetic evolution (Baldwin Effect). Additionally, the work considered the cross-relationships of sexually differentiated philopatry and dispersal, autonomous decision making, attitude-biased foraging, and resultant cognitive dissonance. A conference proceeding describing the experiment and results are on our
Publication page . Another the work that extended those result isavailable here . Or you canDownload Video (mp4) 0.2 MB . Rouly, O.C. and Kennedy, W.G. collaborators. -
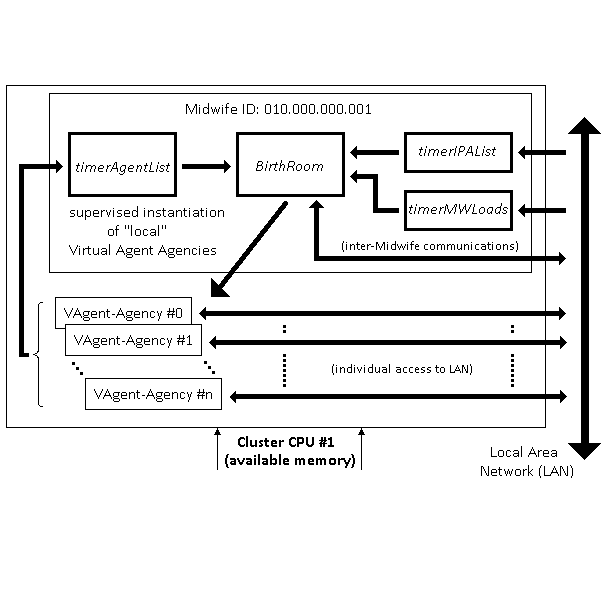
Enable Cluster-based Machine Society. "Midwife: CPU cluster load distribution of Virtual Agent AIs" is work that developed an algorithm to enable the instantiation and hosting of large numbers of virtual agents within a CPU cluster. The Java load distribution algorithm balanced avatar objects as client-side agent controllers across networked CPUs. In turn, the Java component can be integrated with a C# driver that instantiates new avatar clients in a Virtual World. The two-piece code set operates on Windows-based CPU clusters and is designed for the Multi-User Virtual Environment (MUVE) of OpenSimulator and LibOpenMetaverse operating together. The graphic above can be enlarged and viewed by
clicking here . A conference publication describing the code and its operation are on thePublication page . Or, you candownload the Midwife and Nursery code . -
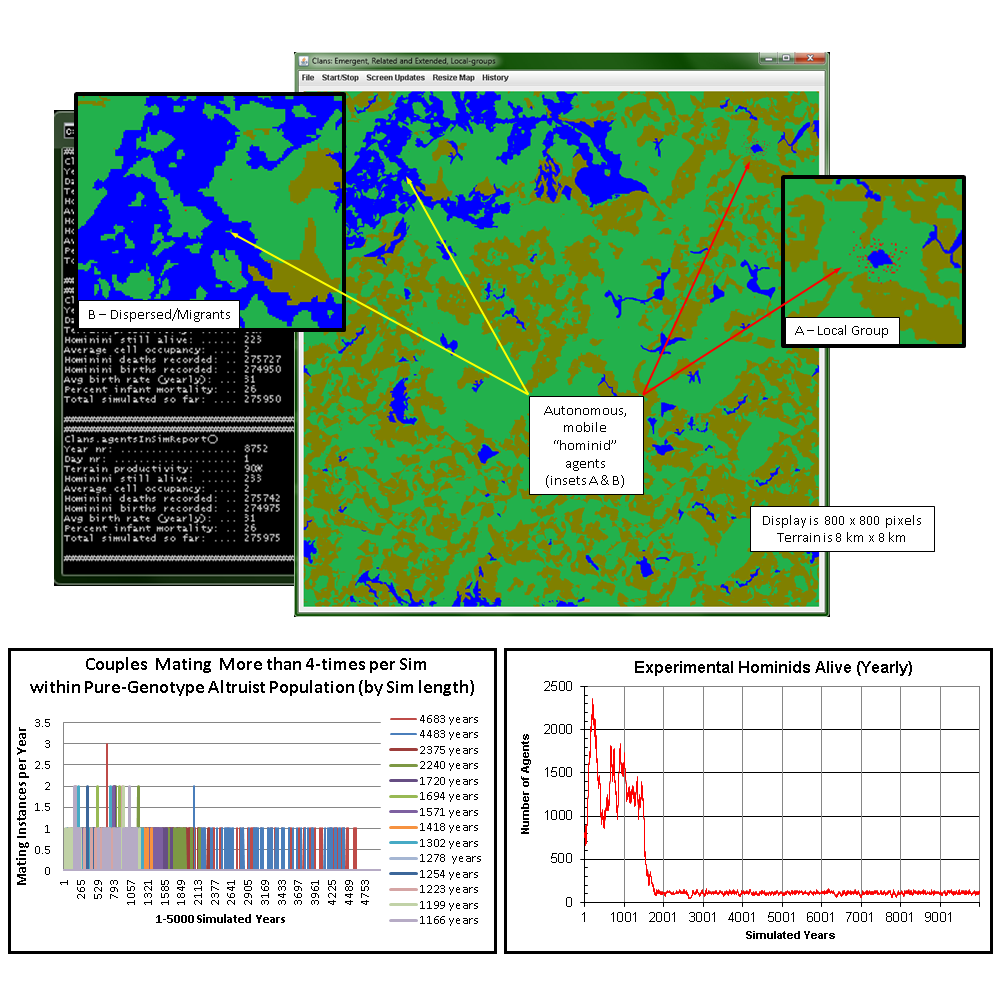
Extending Emergent Biomimetic Sociality. This agent-based model extended the
emulation of hominid biomimesis . It elicited additional emergent, biomimetic sociality from the "hominid" agents that were already biologically detailed, sexually dimorphic, could move about freely foraging, socializing, choosing breeding partners, birthing, and later dying. In every experimental instance semi-permanent breeding bonds emerged among the Pan-like, promiscuous "hominids." Hundreds of generations of artificial "hominids" lived and died in simulations running longer than 10K years of days. The biomimetic algorithms created by this work were constructed to be subsumed by the research thread shown in this gallery. Thisgraphic can be downloaded and expanded . An extended essay describing the agents, their biometics, and the research results are on thePublication page . -
Integrate biomimetics with Machine Intelligence (MI). This research is being developed in parallel with our
Metaverse Exhibition . It will integrate anextensible Turing MI together with previous work extendingemergent biomimetic sociality . Shown down at the far end of this artificial pond there is a troop of six hominid (avatars) crossing and then going from the water uphill. The behavioral threads of each hominid (avatar) in the troop are asynchronously computed "client-side" within acluster-based machine society . Earlier work allowed us toselect a virtual world capable of supporting the troop, our MI, and biomemisis. Using this technological foundation, we can now host a multi-agent system and give it sufficient sensorimotor data to begin carefully cultivated and applied, Artificial Life research. The avatars in this video can be enlarged, somewhat, in ourDownload Video (mp4) 6.2 MB . -
Early North American Migrant Camp. "Late Pleistocene Human Migrations: An Agent-based Modeling Approach" was a simulation of a hypothetical human migration some experts suggested may have occured during the Last Glacial Maximum. Extending such work to other migrations or similar refugee experiences but within a Virtual World might allow us to examine subtle social and environmental interactions in detail and realtime visual accuracy. Although the original 2D ABM was biologically detailed, we are now capable of adding biomimesis and adaptive Machine Intelligence to better demonstrate social and migratory theories in relationship to environmental and possibly social circumscription. There is a conference proceeding available on the
Publication page . The movie shown above can also be downloaded.Download Video (mp4) 10.3 MB . Rouly, O.C. and Crooks, A. collaborators. -
Pedestrian and small-group social behavior at a large venue. This was research using an agent-based model built on a spatially accurate 2D grid of a public venue and parking lot. On the grid were placed gradient "heatmaps" acting as heuristic guides for simulated pedestrian traffic. The "heatmaps" came from empirical observation of customary pedestrian behavior in the United States. No path-directives were given the agents. Rather, agent behavior emerged from "visually" detecting landmark "goals," moving towards them, and by emulating observation-inspired small-group locomotion behaviors taken by individuals and families as they moved from car (parking lot) to building (doors). Simulation identified anomolous crowd behavior of interest to our sponsor. Hendrey, M. Crooks, A. and Rouly, O. C. collaborators.
View the YouTube Video -
Metaverse Exhibition
Access to the Metaverse Exhibition requires an
Opensimulator compatible viewer .
If you already have one use the URL below.
If you do not have one you canuse ours .
Alternatively, you could tryone of these .
To enter the Virtual Exhibition
set your viewer to URL:
http://195.176.107.61:9000/
Here is a
configurable desktop link if you chose our viewer.
Connect with us.
Call us today for more information: (703) 666-8736
(703) 666-8736